[,1]
[1,] 3
[2,] 3
[3,] 3
[4,] 58 Vektoren
In der naturwissenschaftlichen Modellbildung betrachtet man häufig Phänomene, die sich durch das Vorliegen mehrerer quantitativer Merkmale auszeichnen. So ist zum Beispiel die Position eines Objektes im dreidimensionalen Raum durch drei Koordinaten hinsichtlich der drei Achsen eines Kartesischen Koordinatensystems festgelegt. Analog mag der Gesundheitszustand einer Person durch das Vorliegen dreier Messwerte, beispielsweise eines Selbstauskunftsscores, eines Biomarkers und einer Expert:inneneinschätzung charakterisiert sein. Zum Modellieren und Analysieren solcher mehrdimensionaler quantitativer Phänomene stellt die Mathematik mit dem reellen Vektorraum ein vielseitig einsetzbares Hilfsmittel bereit. In diesem Kapitel wollen wir zunächst den Begriff des reellen Vektorraums und das grundlegende Rechnen mit Vektoren einführen (Kapitel 8.1). Eine Vektorraumstruktur, die sich stark an der dreidimensionalen räumlichen Intuition orientiert, bietet dann der Euklidische Vektorraum (Kapitel 8.2). Mithilfe der Vektorrechnung können alle Vektoren eines Vektorraums aus einer kleinen Schar ausgezeichneter Vektoren gebildet werden. Die diesem Prinzip zugrundeliegenden Konzepte diskutieren wir in Kapitel 8.3 und Kapitel 8.4.
8.1 Reeller Vektorraum
Wir beginnen mit der allgemeinen Definition eines Vektorraums, die grundlegende Regeln zum Rechnen mit Vektoren festlegt.
Definition 8.1 (Vektorraum) Es seien \(V\) eine nichtleere Menge und \(S\) eine Menge von Skalaren. Weiterhin sei eine Abbildung \[\begin{equation} + : V \times V \to V, (v_1,v_2) \mapsto +(v_1, v_2) =: v_1 + v_2, \end{equation}\] genannt Vektoraddition, definiert. Schließlich sei eine Abbildung \[\begin{equation} \cdot : S \times V \to V, (s,v) \mapsto \cdot(s,v) =: sv, \end{equation}\] genannt Skalarmultiplikation definiert. Dann wird das Tupel \((V,S,+,\cdot)\) genau dann Vektorraum genannt, wenn für beliebige Elemente \(v,w,u\in V\) und \(a,b \in S\) folgende Bedingungen gelten:
(1) Kommutativität der Vektoraddition. \[ v + w = w + v. \] (2) Assoziativität der Vektoraddition. \[ (v + w) + u = v + (w + u) \] (3) Existenz eines neutralen Elements der Vektoraddition. \[ \mbox{Es gibt einen Vektor } 0 \in V \mbox{ mit } v + 0 = 0 + v = v. \] (4) Existenz inverser Elemente der Vektoraddition \[ \mbox{Für alle Vektoren } v \in V \mbox{ gibt es einen Vektor } -v \in V \mbox{ mit } v + (-v) = 0. \] (5) Existenz eines neutralen Elements der Skalarmultiplikation. \[ \mbox{Es gibt einen Skalar } 1 \in S \mbox{ mit } 1 \cdot v = v. \] (6) Assoziativität der Skalarmultiplikation. \[ a \cdot (b \cdot v) = (a \cdot b)\cdot v. \] (7) Distributivität hinsichtlich der Vektoraddition. \[ a\cdot (v + w) = a\cdot v + a \cdot w. \] (8) Distributivität hinsichtlich der Skalaraddition. \[ (a + b)\cdot v = a\cdot v + b\cdot v. \]
Es fällt auf, dass Definition 8.1 zwar festlegt, wie mit Vektoren gerechnet werden soll, jedoch keine Aussage darüber macht, was ein Vektor, über ein Element einer Menge hinaus, eigentlich ist. Dies ist der Tatsache geschuldet, dass es verschiedenste mathematische Objekte gibt, für die Vektorraumstrukturen definiert werden können. Beispiele dafür sind die Menge der reellen \(m\)-Tupel, die Menge der Matrizen, die Menge der Polynome, die Menge der Lösungen eines linearen Gleichungssystems, die Menge der reellen Folgen, die Menge der stetigen Funktionen u.v.a.m.
Wir sind hier zunächst nur am Vektorraum der Menge der reellen \(m\)-Tupel interessiert. Wir erinnern dazu daran, dass wir die reellen \(m\)-Tupel mit \[\begin{equation} \mathbb{R}^m := \left\lbrace \begin{pmatrix} x_1 \\ \vdots \\ x_m \end{pmatrix} | x_i \in \mathbb{R} \mbox{ für alle } 1 \le i \le m \right\rbrace \end{equation}\] bezeichnen und \(\mathbb{R}^m\) als “\(\mathbb{R}\) hoch m” aussprechen. Die Elemente \(x \in \mathbb{R}^m\) nennen wir reelle Vektoren oder auch einfach Vektoren. Wir wollen nun der Definition eines Vektorraums die Menge \(\mathbb{R}^m\) zugrunde legen. Dazu definieren wir zunächst die Vektoraddition für Elemente von \(\mathbb{R}^m\) und die Skalarmultiplikation für Elemente von \(\mathbb{R}\) und \(\mathbb{R}^m\).
Definition 8.2 (Vektoraddition und Skalarmultiplikation in \(\mathbb{R}^m\)) Für alle \(x,y \in \mathbb{R}^m\) und \(a \in \mathbb{R}\) sei die Vektoraddition durch \[\begin{equation} + : \mathbb{R}^m \times \mathbb{R}^m \to \mathbb{R}^m, (x,y) \mapsto x + y = \begin{pmatrix} x_1 \\ \vdots \\ x_m \end{pmatrix} + \begin{pmatrix} y_1 \\ \vdots \\ y_m \end{pmatrix} := \begin{pmatrix} x_1 + y_1 \\ \vdots \\ x_m + y_m \end{pmatrix} \end{equation}\] und die Skalarmultiplikation durch \[\begin{equation} \cdot : \mathbb{R} \times \mathbb{R}^m \to \mathbb{R}^m, (a,x) \mapsto ax = a \begin{pmatrix} x_1 \\ \vdots \\ x_m \end{pmatrix} := \begin{pmatrix} ax_1 \\ \vdots \\ a x_m \end{pmatrix} \end{equation}\] definiert.
Es ergibt sich dann folgendes Resultat.
Theorem 8.1 (Reeller Vektorraum) \((\mathbb{R}^m,\mathbb{R},+,\cdot)\) mit den Rechenregeln der Addition und Multiplikation in \(\mathbb{R}\) ist ein Vektorraum.
Für einen Beweis, auf den wir hier verzichten wollen, muss man die Bedingungen (1) bis (8) aus Definition 8.1 für die hier betrachtete Menge und die hier festgelegten Formen der Vektoraddition und der Skalarmultiplikation nachweisen. Diese ergeben sich aber leicht aus den Rechenregeln von Addition und Multiplikation in \(\mathbb{R}\) und der Tatsache, dass Vektoraddition und Skalarmultiplikation für Elemente von \(\mathbb{R}^m\) in Definition 8.2 komponentenweise definiert wurden. Wir definieren damit den Begriff des reellen Vektorraums.
Definition 8.3 (Reeller Vektorraum) Für \(\mathbb{R}^m\) seien \(+\) und \(\cdot\) die in Definition 8.2 definierte Vektoraddition und Skalarmultiplikation. Dann nennen wir auf Grundlage von Theorem 8.1 den Vektorraum \((\mathbb{R}^m,\mathbb{R},+,\cdot)\) den reellen Vektorraum.
Auf Grundlage von Definition 8.3 wollen wir uns nun das Rechnen mit reellen Vektoren anhand einiger Beispiele verdeutlichen.
Beispiele
(1) Für
\[ x:= \begin{pmatrix} 1 \\ 2 \\ 3 \\ 4 \end{pmatrix} \in \mathbb{R}^4 \mbox{ und } y:= \begin{pmatrix} 2 \\ 1 \\ 0 \\ 1 \end{pmatrix} \in \mathbb{R}^4 \] gilt \[ x + y = \begin{pmatrix} 1 \\ 2 \\ 3 \\ 4 \end{pmatrix} + \begin{pmatrix} 2 \\ 1 \\ 0 \\ 1 \end{pmatrix} = \begin{pmatrix} 1 + 2 \\ 2 + 1 \\ 3 + 0\\ 4 + 1 \end{pmatrix} = \begin{pmatrix} 3 \\ 3\\ 3 \\ 5 \end{pmatrix} \in \mathbb{R}^4. \] In R implementiert man dieses Beispiel wie folgt
(2) Für \[ x:= \begin{pmatrix} 2 \\ 3 \end{pmatrix} \in \mathbb{R}^2 \mbox{ und } y:= \begin{pmatrix} 1 \\ 3 \end{pmatrix} \in \mathbb{R}^2 \] gilt \[ x - y = \begin{pmatrix} 2 \\ 3 \end{pmatrix} - \begin{pmatrix} 1 \\ 3 \end{pmatrix} = \begin{pmatrix} 2 - 1 \\ 3 - 3 \end{pmatrix} = \begin{pmatrix} 1 \\ 0 \end{pmatrix} \in \mathbb{R}^2. \] In R implementiert man dieses Beispiel wie folgt
[,1]
[1,] 1
[2,] 0(3) Für \[ x:= \begin{pmatrix} 2 \\ 1 \\ 3 \end{pmatrix} \in \mathbb{R}^3 \mbox{ und } a := 3 \in \mathbb{R} \] gilt \[ ax = 3 \begin{pmatrix} 2 \\ 1 \\ 3 \end{pmatrix} = \begin{pmatrix} 3 \cdot 2 \\ 3 \cdot 1 \\ 3 \cdot 3 \end{pmatrix} = \begin{pmatrix} 6 \\ 3 \\ 9 \end{pmatrix} \in \mathbb{R}^3. \] In R implementiert man dieses Beispiel wie folgt
[,1]
[1,] 6
[2,] 3
[3,] 9Für \(m \in \{1,2,3\}\) kann man sich reelle Vektoren und das Rechnen mit ihnen visuell veranschaulichen. Für \(m > 3\), wenn also zum Beispiel für eine Person mehr als drei quantitative Merkmale zu ihrem Gesundheitszustand vorliegen, was in der Anwendung regelmäßig der Fall ist, ist dies nicht möglich. Trotzdem mag die visuelle Intuition für \(m \le 3\) einen Einstieg in das Verständnis von Vektorräumen erleichtern. Wir fokussieren hier auf den Fall \(m := 2\). In diesem Fall liegen die betrachteten reellen Vektoren in der zweidimensionalen Ebene und werden üblicherweise als Punkte oder Pfeile visualisiert (Abbildung 8.1).
Abbildung 8.2 visualisiert die Vektoraddition \[\begin{equation} \begin{pmatrix} 1 \\ 2 \end{pmatrix} + \begin{pmatrix} 3 \\ 1 \end{pmatrix} = \begin{pmatrix} 4 \\ 3 \end{pmatrix}. \end{equation}\] Der Summenvektor entspricht dabei der Diagonale des von den beiden Summanden aufgespannten Parallelogramms.
Abbildung 8.3 visualisiert die Vektorsubtraktion \[\begin{equation} \begin{pmatrix} 1 \\ 2 \end{pmatrix} - \begin{pmatrix} 3 \\ 1 \end{pmatrix} = \begin{pmatrix} 1 \\ 2 \end{pmatrix} + \begin{pmatrix} -3 \\ -1 \end{pmatrix} = \begin{pmatrix} -2 \\ \,\, 1 \end{pmatrix} \end{equation}\] Der resultierende Vektor entspricht dabei der Diagonale des von dem ersten Vektor und dem entgegengesetzten Vektor des zweiten Vektors aufgespannten Parallelogramms.
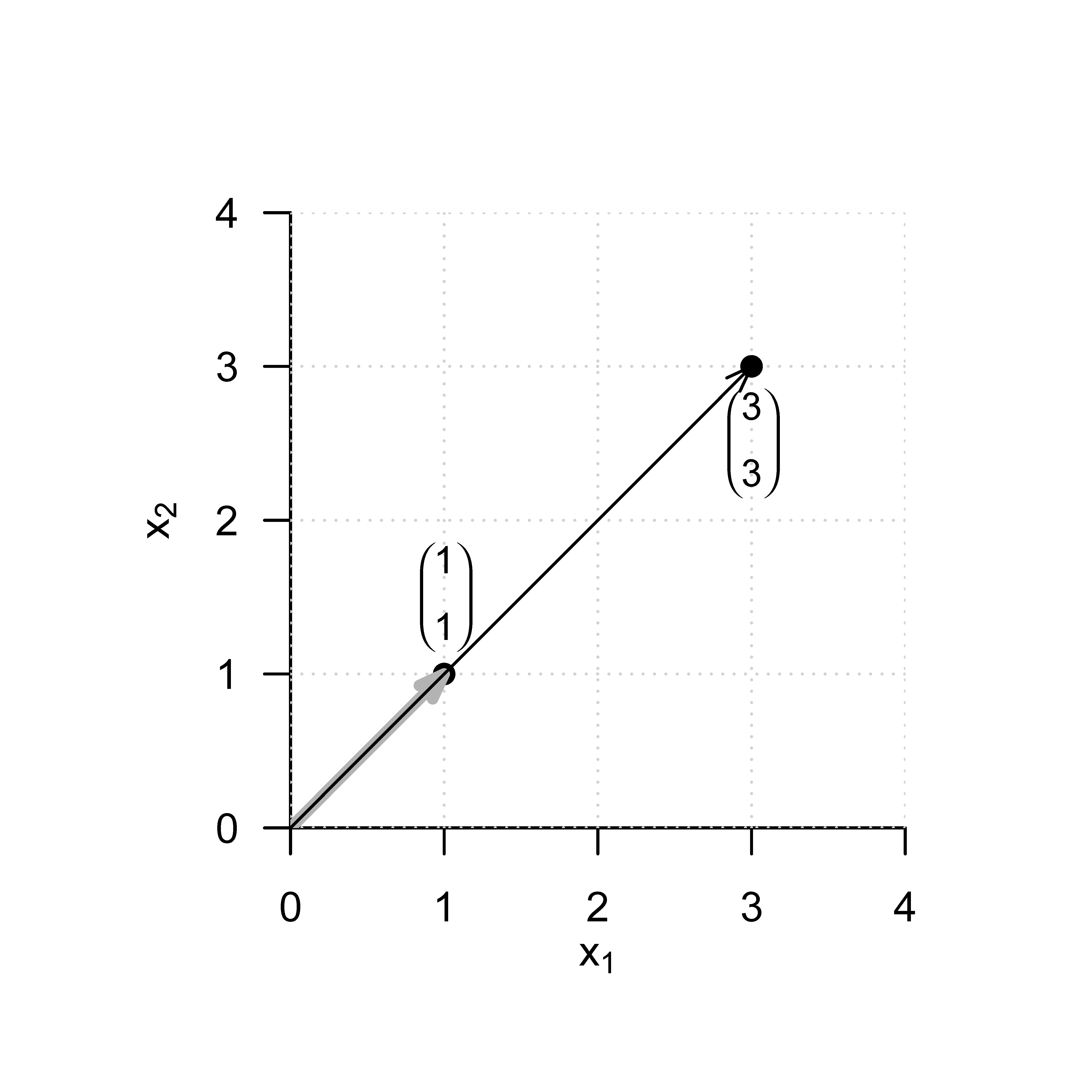
Abbildung 8.4 schließlich visualisiert die Skalarmultiplikation \[\begin{equation} 3 \begin{pmatrix} 1 \\ 1 \end{pmatrix} = \begin{pmatrix} 3 \\ 3 \end{pmatrix} \end{equation}\] Die Multiplikation eines Vektors mit einem positiven Skalar ändert dabei nur seine Länge, nicht jedoch seine Richtung.
8.2 Euklidischer Vektorraum
Der reelle Vektorraum kann durch Definition des Skalarprodukts im Sinne eines Euklidischen Vektorraums mit räumlich-geometrischer Intuition versehen werden. Diese ermöglicht es insbesondere, Begriffe wie die Länge eines Vektors, den Abstand zwischen zwei Vektoren, und nicht zuletzt den Winkel zwischen zwei Vektoren zu definieren und zu berechnen. Wir führen zunächst das Skalarprodukt ein.
Definition 8.4 (Skalarprodukt auf \(\mathbb{R}^m\)) Das Skalarprodukt auf \(\mathbb{R}^m\) ist definiert als die Abbildung \[\begin{equation} \langle \rangle : \mathbb{R}^m \times \mathbb{R}^m \to \mathbb{R}, (x,y) \mapsto \langle (x,y) \rangle := \langle x,y \rangle := \sum_{i=1}^m x_i y_i. \end{equation}\]
Das Skalarprodukt heißt Skalarprodukt, weil es einen Skalar ergibt, nicht etwa, weil mit Skalaren multipliziert wird. Das Skalarprodukt steht in enger Beziehung zum Matrixprodukt, wie wir an späterer Stelle sehen werden. Wir betrachten zunächst ein Beispiel und seine Implementation in R.
Beispiel
Es seien \[\begin{equation} x := \begin{pmatrix} 1 \\ 2 \\ 3 \end{pmatrix} \mbox{ und } y := \begin{pmatrix} 2 \\ 0 \\ 1 \end{pmatrix} \end{equation}\] Dann ergibt sich \[\begin{equation} \langle x,y \rangle = x_1y_1 + x_2y_2 + x_3y_3 = 1 \cdot 2 + 2 \cdot 0 + 3 \cdot 1 = 2 + 0 + 3 = 5. \end{equation}\]
In R gibt es verschiedene Möglichkeiten, ein Skalarprodukt auszuwerten. Wir führen zwei von ihnen für das gegebene Beispiel untenstehend auf.
[1] 5 [,1]
[1,] 5Mithilfe des Skalarprodukts kann der Begriff des reellen Vektorraums zum Begriff des reellen kanonischen Euklidischen Vektorraums erweitert werden.
Definition 8.5 (Euklidischer Vektorraum) Das Tupel \(\left((\mathbb{R}^m, +, \cdot), \langle \rangle \right)\) aus dem reellen Vektorraum \((\mathbb{R}^m, +, \cdot)\) und dem Skalarprodukt \(\langle \rangle\) auf \(\mathbb{R}^m\) heißt reeller kanonischer Euklidischer Vektorraum.
Generell heißt jedes Tupel aus einem Vektorraum und einem Skalarprodukt “Euklidischer Vektorraum”. Informell sprechen wir aber oft auch einfach von \(\mathbb{R}^m\) als “Euklidischer Vektorraum” und insbesondere bei \(\left((\mathbb{R}^m, +, \cdot), \langle \rangle \right)\) vom “Euklidischen Vektorraum”. Ein Euklidischer Vektorraum ist ein Vektorraum mit geometrischer Struktur, die durch das Skalarprodukt induziert wird. Insbesondere bekommen im Euklidischen Vektorraum nun die geometrischen Begriffe von Länge, Abstand und Winkel eine Bedeutung. Wir definieren sie wie folgt.
Definition 8.6 \(\left((\mathbb{R}^m, +, \cdot), \langle \rangle \right)\) sei der Euklidische Vektorraum.
(1) Die Länge eines Vektors \(x \in \mathbb{R}^m\) ist definiert als \[\begin{equation} \Vert x \Vert := \sqrt{\langle x, x \rangle}. \end{equation}\] (2) Der Abstand zweier Vektoren \(x,y \in \mathbb{R}^m\) ist definiert als \[\begin{equation} d(x,y) := \Vert x - y \Vert. \end{equation}\] (3) Der Winkel \(\alpha\) zwischen zwei Vektoren \(x,y \in \mathbb{R}^m\) mit \(x,y \neq 0\) ist definiert durch \[\begin{equation} 0 \le \alpha \le \pi \mbox{ und } \cos \alpha := \frac{\langle x, y \rangle}{\Vert x \Vert \Vert y \Vert} \end{equation}\]
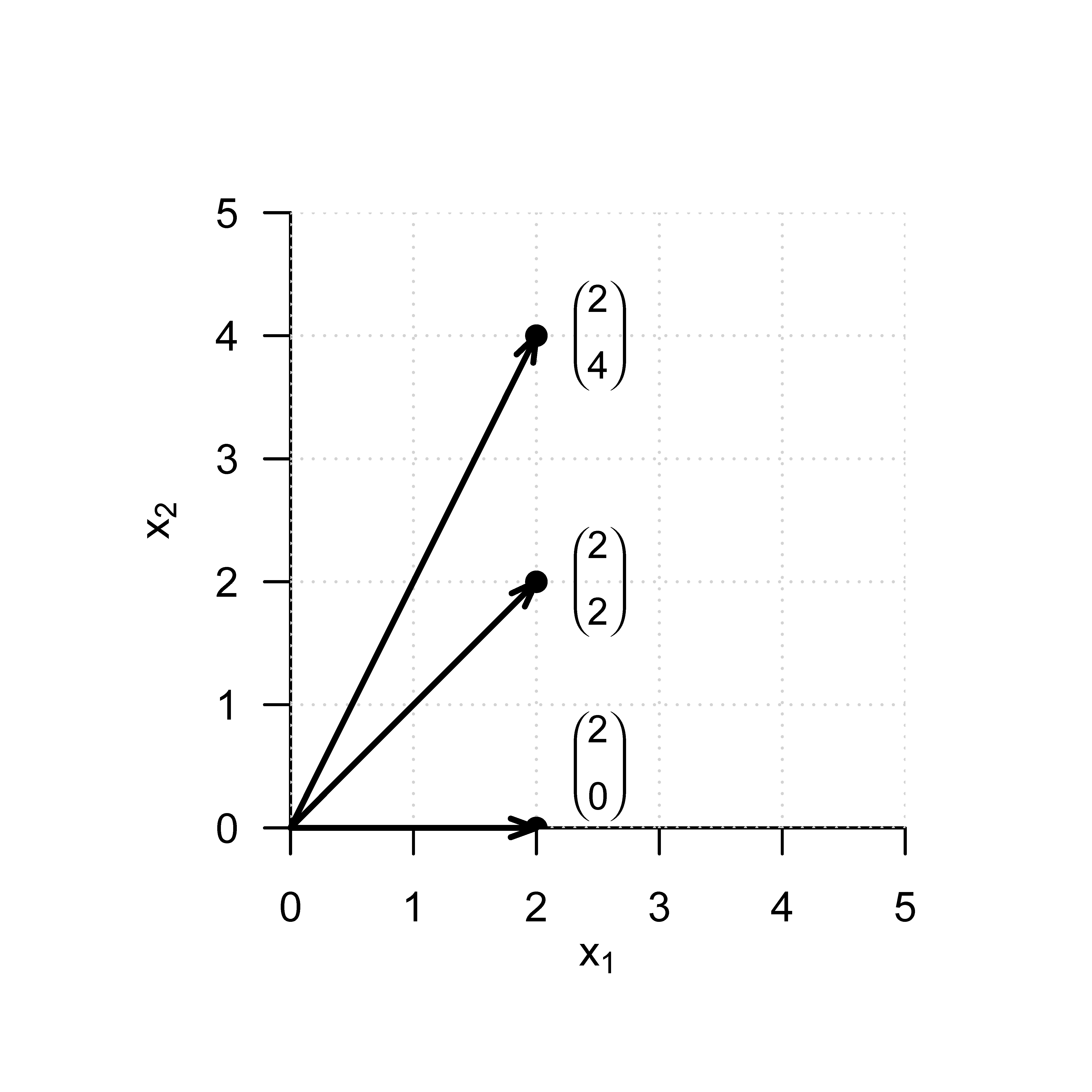
Die Länge \(\Vert x \Vert\) eines Vektors \(x \in \mathbb{R}^m\) heißt auch Euklidische Norm von \(x\) oder \(\ell_2\)-Norm von \(x\) oder einfach Norm von \(x\). Sie wird häufig auch mit \(\Vert x \Vert_2\) bezeichnet. Wir betrachten drei Beispiele für die Bestimmung der Länge eines Vektors und ihre entsprechende R Implementation. Wir veranschaulichen diese Beispiele in Abbildung 8.5.
Beispiel (1)
\[\begin{equation} \left\lVert \begin{pmatrix} 2 \\ 0 \end{pmatrix} \right\rVert = \sqrt{\left\langle \begin{pmatrix} 2 \\ 0 \end{pmatrix}, \begin{pmatrix} 2 \\ 0 \end{pmatrix} \right\rangle} = \sqrt{2^2 + 0^2} = \sqrt{4} = 2.00 \end{equation}\]
Beispiel (2)
\[\begin{equation} \left\lVert \begin{pmatrix} 2 \\ 2 \end{pmatrix} \right\rVert = \sqrt{\left\langle \begin{pmatrix} 2 \\ 2 \end{pmatrix}, \begin{pmatrix} 2 \\ 2 \end{pmatrix} \right\rangle} = \sqrt{2^2 + 2^2} = \sqrt{8} \approx 2.83 \end{equation}\]
Beispiel (3)
\[\begin{equation} \left\lVert \begin{pmatrix} 2 \\ 4 \end{pmatrix} \right\rVert = \sqrt{\left\langle \begin{pmatrix} 2 \\ 4 \end{pmatrix}, \begin{pmatrix} 2 \\ 4 \end{pmatrix} \right\rangle} = \sqrt{2^2 + 4^2} = \sqrt{20} \approx 4.47 \end{equation}\]
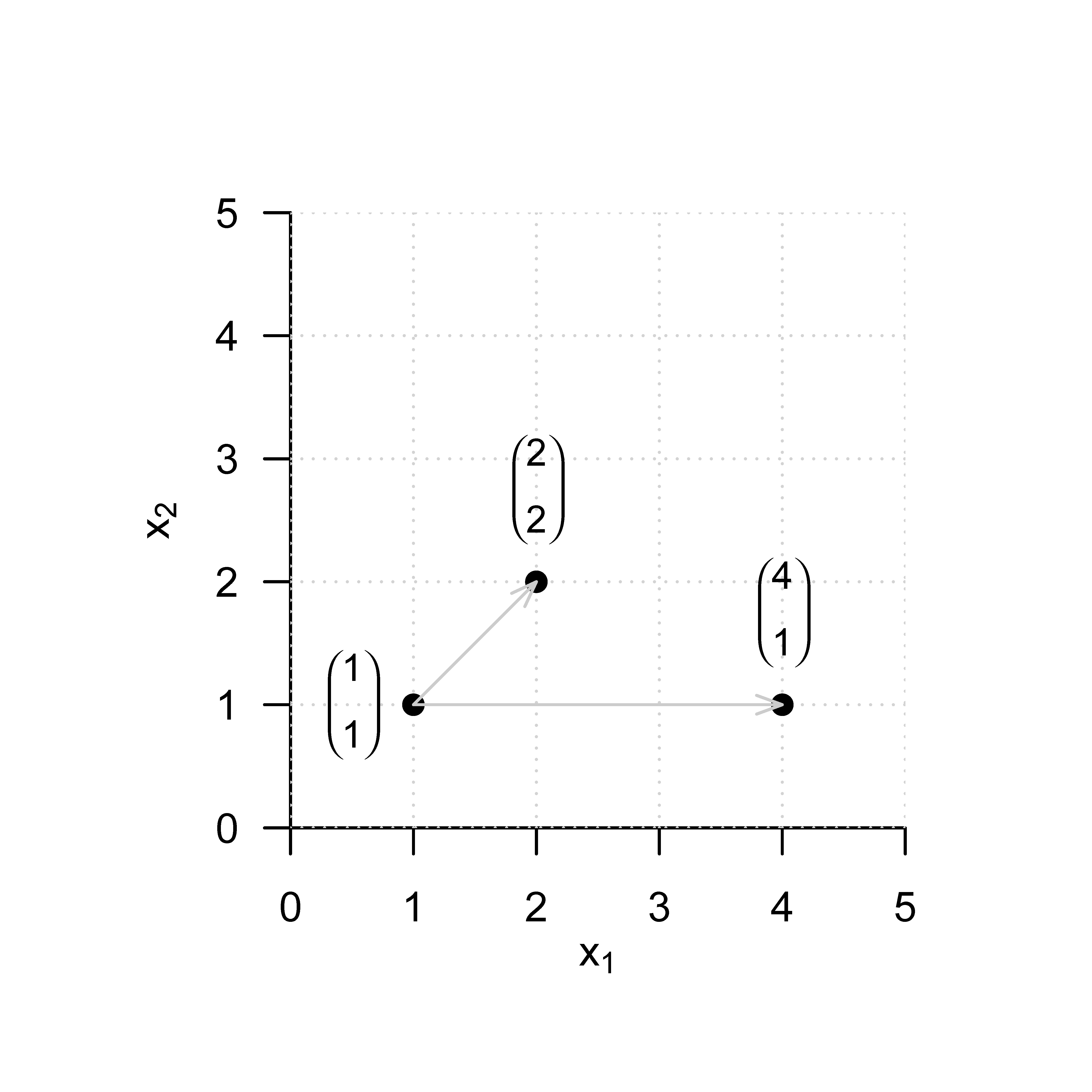
Für den Abstand \(d(x,y)\) zweier Vektoren \(x,y\in\mathbb{R}^m\) halten wir ohne Beweis fest, dass er zum einen nicht-negativ und symmetrisch ist, also dass \[\begin{equation} d(x,y) \ge 0, d(x,x) = 0 \mbox{ und } d(x,y) = d(y,x) \end{equation}\] gelten. Zudem erfüllt \(d(x,y)\) die sogenannte Dreiecksungleichung, die besagt, dass die direkte Wegstrecke zwischen zwei Punkten im Raum immer kürzer ist als eine indirekte Wegstrecke über einen dritten Punkt, \[\begin{equation} d(x,y) \le d(x,z) + d(z,y). \end{equation}\] Damit erfüllt \(d(x,y)\) wichtige Aspekte der räumlichen Anschauung. Wir geben zwei Beispiele für die Bestimmung von Abständen von Vektoren in \(\mathbb{R}^2\), die wir in Abbildung 8.6 visualisieren.
Beispiel (1)
\[\begin{equation} d\left(\begin{pmatrix} 1 \\ 1 \end{pmatrix}, \begin{pmatrix} 2 \\ 2 \end{pmatrix}\right) = \left\lVert \begin{pmatrix} 1 \\ 1 \end{pmatrix} - \begin{pmatrix} 2 \\ 2 \end{pmatrix} \right\rVert = \left\lVert \begin{pmatrix} -1 \\ -1 \end{pmatrix} \right\rVert = \sqrt{(-1)^2 + (-1)^2} = \sqrt{2} \approx 1.41 \end{equation}\]
Beispiel (2)
\[\begin{equation} d\left(\begin{pmatrix} 1 \\ 1 \end{pmatrix}, \begin{pmatrix} 4 \\ 1 \end{pmatrix}\right) = \left\lVert \begin{pmatrix} 1 \\ 1 \end{pmatrix} - \begin{pmatrix} 4 \\ 1 \end{pmatrix} \right\rVert = \left\lVert \begin{pmatrix} -3 \\ 0 \end{pmatrix} \right\rVert = \sqrt{(-3)^2 + 0^2} = \sqrt{9} = 3 \end{equation}\]
Schließlich halten wir fest, dass für die Berechnung des Winkels zwischen zwei Vektoren anhand obiger Definition gilt, dass die Kosinusfunktion \(\cos\) auf \([0,\pi]\) bijektiv, also invertierbar mit der Umkehrfunktion \(acos\), der Arkuskosinusfunktion, ist. Auch für den Begriff des Winkels wollen wir zwei Beispiele betrachten. Man beachte dabei insbesondere, dass die Definition 8.6 den Winkel im Bogenmaß angibt. Für eine Angabe in Grad ist eine entsprechende Umrechnung erforderlich.
Beispiel (1)
\[\begin{equation} \mbox{acos} \left(\frac{\left\langle \begin{pmatrix} 3 \\ 0 \end{pmatrix}, \begin{pmatrix} 3 \\ 3 \end{pmatrix} \right\rangle} {\left\lVert \begin{pmatrix} 3 \\ 0 \end{pmatrix} \right\rVert \left\lVert \begin{pmatrix} 3 \\ 3 \end{pmatrix} \right\rVert} \right) = \mbox{acos} \left(\frac{3\cdot 3 + 3 \cdot 0} {\sqrt{3^2 + 0^2} \cdot \sqrt{3^2 + 3^2}} \right) = \mbox{acos} \left(\frac{9} {3 \cdot \sqrt{18}} \right) = \frac{\pi}{4} \approx 0.785 \end{equation}\]
Die Umrechnung in Grad ergibt dann \[\begin{equation} 0.785 \cdot \frac{180°}{\pi} = 45° \end{equation}\] In R implementiert man dies wie folgt.
[1] 45Beispiel (2)
\[\begin{equation} \alpha = \mbox{acos} \left(\frac{\left\langle \begin{pmatrix} 3 \\ 0 \end{pmatrix}, \begin{pmatrix} 0 \\ 3 \end{pmatrix} \right\rangle} {\left\lVert \begin{pmatrix} 3 \\ 0 \end{pmatrix} \right\rVert \left\lVert \begin{pmatrix} 0 \\ 3 \end{pmatrix} \right\rVert} \right) = \mbox{acos} \left(\frac{3\cdot 0 + 0 \cdot 3} {\sqrt{3^2 + 0^2} \cdot \sqrt{0^2 + 3^2}} \right) = \mbox{acos} \left(\frac{0} {3 \cdot 3} \right) = \frac{\pi}{2} \approx 1.57 \end{equation}\] Die Umrechnung in Grad ergibt dann \[\begin{equation} \frac{\pi}{2} \cdot \frac{180°}{\pi} = 90° \end{equation}\] Die entsprechende R Implementation lautet wie folgt.
[1] 90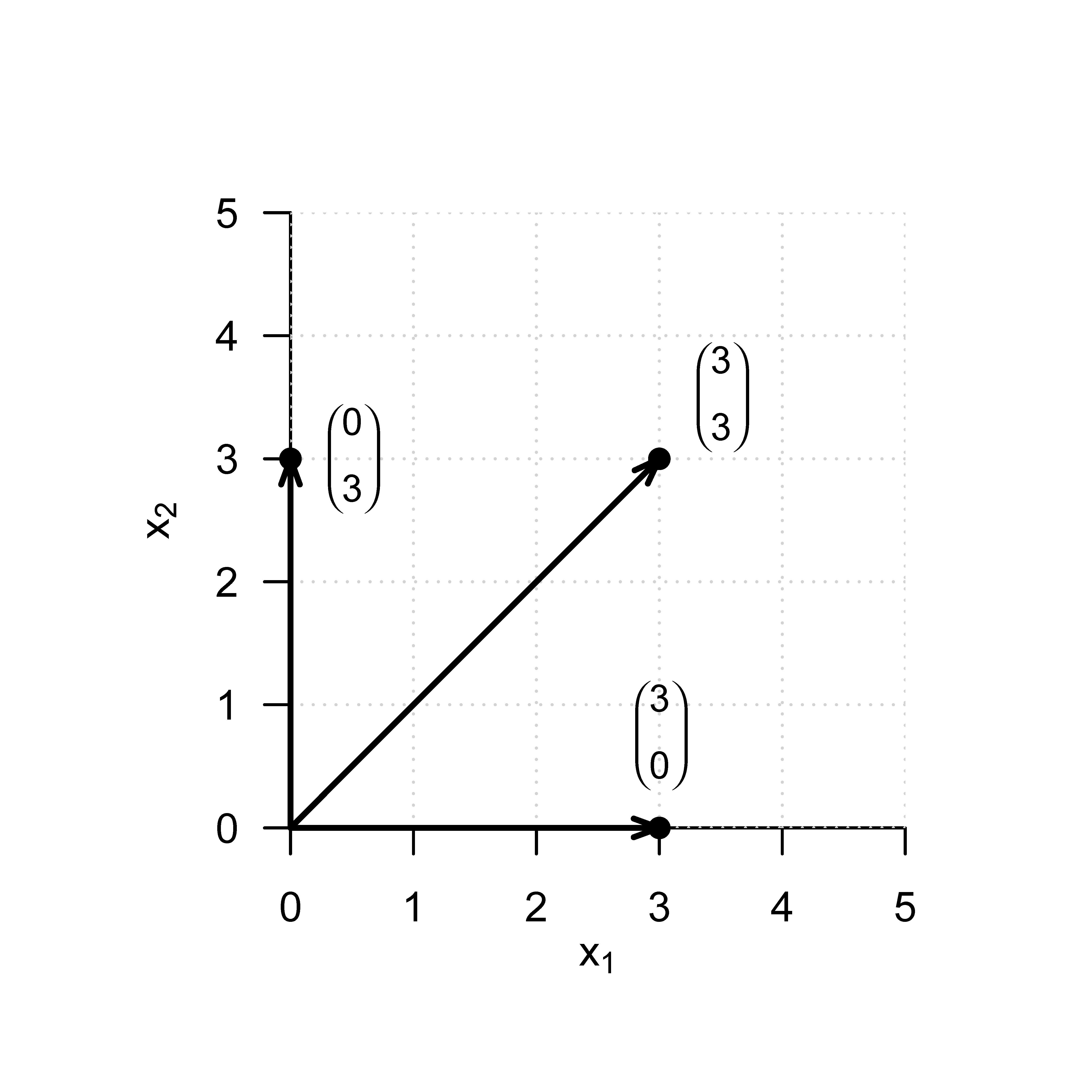
Die Tatsache, dass zwei Vektoren einen rechten Winkel bilden können, also gewissermaßen maximal nicht-parallel sein können, ist ein wichtiges geometrisches Prinzip und wird deshalb mit folgender Definition speziell ausgezeichnet.
Definition 8.7 (Orthogonalität und Orthonormalität von Vektoren) \(\left((\mathbb{R}^m, +, \cdot), \langle \rangle \right)\) sei der Euklidische Vektorraum.
(1) Zwei Vektoren \(x,y \in \mathbb{R}^m\) heißen orthogonal, wenn gilt, dass \[\begin{equation} \langle x, y \rangle = 0 \end{equation}\] (2) Zwei Vektoren \(x,y \in \mathbb{R}^m\) heißen orthonormal, wenn gilt, dass \[\begin{equation} \langle x, y \rangle = 0 \mbox{ und } \Vert x \Vert = \Vert y \Vert = 1. \end{equation}\]
Für orthogonale und orthonormale Vektoren gilt also insbesondere auch \[\begin{equation} \cos \alpha = \frac{\langle x, y \rangle}{\Vert x \Vert \Vert y \Vert} = \frac{0}{\Vert x \Vert \Vert y \Vert} = 0, \end{equation}\] also \[\begin{equation} \alpha = \frac{\pi}{2} = 90°. \end{equation}\]
8.3 Lineare Unabhängigkeit
In diesem Abschnitt führen wir den Begriff der linearen Unabhängigkeit von Vektoren ein. Wir definieren dazu zunächst den Begriff der Linearkombination von Vektoren.
Definition 8.8 (Linearkombination) \(\{v_1, v_2, ..., v_k\}\) sei eine Menge von \(k\) Vektoren eines Vektorraums \(V\) und \(a_1, a_2,...,a_k\) seien Skalare. Dann ist die Linearkombination der Vektoren in \(\{v_1, v_2, ..., v_k\}\) mit den Koeffizienten \(a_1, a_2,...,a_k\) definiert als der Vektor \[\begin{equation} w := \sum_{i=1}^k a_i v_i \in V. \end{equation}\]
Beispiel
Es seien \[\begin{equation} v_1 := \begin{pmatrix} 2 \\ 1 \end{pmatrix}, v_2 := \begin{pmatrix} 1 \\ 1 \end{pmatrix}, v_3 := \begin{pmatrix} 0 \\ 1 \end{pmatrix} \mbox{ und } a_1 := 2, a_2 := 3, a_3 := 0. \end{equation}\] Dann ergibt sich die Linearkombination von \(v_1,v_2,v_3\) mit den Koeffizienten \(a_1,a_2,a_3\) zu \[\begin{align} \begin{split} w & = a_1v_1 + a_2v_2 + a_3v_3 \\ & = 2 \cdot \begin{pmatrix} 2 \\ 1 \end{pmatrix} + 3 \cdot \begin{pmatrix} 1 \\ 1 \end{pmatrix} + 0 \cdot \begin{pmatrix} 0 \\ 1 \end{pmatrix} \\ & = \begin{pmatrix} 4 \\ 2 \end{pmatrix} + \begin{pmatrix} 3 \\ 3 \end{pmatrix} + \begin{pmatrix} 0 \\ 0 \end{pmatrix} \\ & = \begin{pmatrix} 7 \\ 5 \end{pmatrix}. \end{split} \end{align}\]
Basierend auf dem Begriff der Linearkombination kann man nun den Begriff der Linearen Unabhängigkeit von Vektoren definieren.
Definition 8.9 (Lineare Unabhängigkeit) \(V\) sei ein Vektorraum. Eine Menge \(W := \{w_1, w_2, ...,w_k\}\) von Vektoren in \(V\) heißt linear unabhängig, wenn die einzige Repräsentation des Nullelements \(0 \in V\) durch eine Linearkombination der \(w \in W\) die sogenannte triviale Repräsentation \[\begin{equation} 0 = a_1 w_1 + a_2 w_2 + \cdots + a_k w_k \mbox{ mit } a_1 = a_2 = \cdots = a_k = 0 \end{equation}\] ist. Wenn die Menge \(W\) nicht linear unabhängig ist, dann heißt sie linear abhängig.
Um zu prüfen, ob eine gegebene Menge von Vektoren linear abhängig oder unabhängig ist, muss man prinzipiell prüfen, ob eine mögliche Linearkombination der gegebenen Vektoren null ist. Theorem 8.2 und Theorem 8.3 zeigen, wie dies für zwei bzw. endlich viele Vektoren auch mit weniger Aufwand gelingen kann.
Theorem 8.2 (Lineare Abhängigkeit von zwei Vektoren) \(V\) sei ein Vektorraum. Zwei Vektoren \(v_1, v_2 \in V\) sind linear abhängig, wenn einer der Vektoren ein skalares Vielfaches des anderen Vektors ist.
Beweis. \(v_1\) sei ein skalares Vielfaches von \(v_2\), also \[\begin{equation} v_1 = \lambda v_2 \mbox{ mit } \lambda \neq 0. \end{equation}\] Dann gilt \[\begin{equation} v_1 - \lambda v_2 = 0. \end{equation}\] Dies aber entspricht der Linearkombination \[\begin{equation} a_1v_1 + a_2v_2 = 0 \end{equation}\] mit \(a_1 = 1 \neq 0\) und \(a_2 = -\lambda \neq 0\). Es gibt also eine Linearkombination des Nullelementes, die nicht die triviale Repräsentation ist, und damit sind \(v_1\) und \(v_2\) nicht linear unabhängig.
Theorem 8.3 (Lineare Abhängigkeit einer Menge von Vektoren) \(V\) sei ein Vektorraum und \(w_1,...,w_k \in V\) sei eine Menge von Vektoren in \(V\). Wenn einer der Vektoren \(w_i\) mit \(i = 1,...,k\) eine Linearkombination der anderen Vektoren ist, dann ist die Menge der Vektoren linear abhängig.
Beweis. Die Vektoren \(w_1,...,w_k\) sind genau dann linear abhängig, wenn gilt, dass \(\sum_{i=1}^k a_i w_i = 0\) mit mindestens einem \(a_i \neq 0\). Es sei also zum Beispiel \(a_j \neq 0\). Dann gilt \[\begin{equation} 0 = \sum_{i=1}^k a_i w_i = \sum_{i=1, i \neq j}^k a_i w_i + a_jw_j \end{equation}\] Also folgt \[\begin{equation} a_jw_j = - \sum_{i=1, i \neq j}^k a_i w_i \end{equation}\] und damit \[\begin{equation} w_j = - a_j^{-1}\sum_{i=1, i \neq j}^k a_i w_i = - \sum_{i=1, i \neq j}^k (a_j^{-1}a_i) w_i \end{equation}\] Also ist \(w_j\) eine Linearkombination der \(w_i\) für \(i = 1,...,k\) mit \(i \neq j\).
8.4 Vektorraumbasen
In diesem Abschnitt wollen wir den Begriff der Vektorraumbasis einführen. Eine Basis eines Vektorraums ist eine Untermenge von Vektoren des Vektorraums, die zur Darstellung aller Vektoren des Vektorraums genutzt werden kann. Im Sinne der linearen Kombination von Vektoren enthält also eine Vektorraumbasis alle nötigen Informationen zur Konstruktion des entsprechenden Vektorraums. Allerdings ist eine Vektorraumbasis in der Regel nicht eindeutig und viele Vektorräume haben in der Tat unendlich viele Basen. Die folgende Definition sagt zunächst aus, wie aus einer beschränkten Anzahl von Vektoren mithilfe von Linearkombinationen unendlich viele Vektoren gebildet werden können.
Definition 8.10 (Lineare Hülle und Aufspannen) \(V\) sei ein Vektorraum und es sei \(W := \{w_1,...,w_k\} \subset V\). Dann ist die lineare Hülle von \(W\) definiert als die Menge aller Linearkombinationen der Elemente von \(W\), \[\begin{equation} \mbox{Span}(W) := \left\lbrace \sum_{i=1}^k a_iw_i \vert a_1,...,a_k \mbox{ sind skalare Koeffizienten } \right\rbrace \end{equation}\] Man sagt, dass eine Menge von Vektoren \(W \subseteq V\) einen Vektorraum \(V\) aufspannt, wenn jedes \(v \in V\) als eine Linearkombination von Vektoren in \(W\) geschrieben werden kann.
Wir definieren nun den Begriff der Basis eines Vektorraums.
Definition 8.11 (Basis) \(V\) sei ein Vektorraum und es sei \(B \subseteq V\). \(B\) heißt eine Basis von \(V\), wenn
- die Vektoren in \(B\) linear unabhängig sind und
- die Vektoren in \(B\) den Vektorraum \(V\) aufspannen.
Basen von Vektorräumen haben folgende wichtige Eigenschaften.
Theorem 8.4 (Eigenschaften von Basen)
- Alle Basen eines Vektorraums beinhalten die gleiche Anzahl von Vektoren.
- Jede Menge von \(m\) linear unabhängigen Vektoren ist Basis eines \(m\)-dimensionalen Vektorraums.
Für einen Beweis dieses sehr tiefen Theorems verweisen wir auf die weiterführende Literatur. Die mit obigem Theorem benannte eindeutige Anzahl der Vektoren einer Basis eines Vektorraums heißt die Dimension des Vektorraums. Da es in der Regel unendlich viele Mengen von m linear unabhängigen Vektoren in einem Vektorraum gibt, haben Vektorräume in der Regel unendlich viele Basen.
Betrachtet man nun einen einzelnen Vektor in einem Vektorraum, so kann man sich fragen, wie man diesen mithilfe einer Vektorraumbasis darstellen kann. Dies führt auf folgende Begriffsbildungen.
Definition 8.12 (Basisdarstellung und Koordinaten) \(B := \{b_1,...,b_m\}\) sei eine Basis eines \(m\)-dimensionalen Vektorraumes \(V\) und es sei \(v \in V\). Dann heißt die Linearkombination \[\begin{equation} v = \sum_{i = 1}^m c_i b_i \end{equation}\] die Darstellung von \(v\) bezüglich der Basis \(B\) und die Koeffizienten \(c_1,...,c_m\) heißen die Koordinaten von \(v\) bezüglich der Basis \(B\).
Bei fester Basis sind auch die Koordinaten eines Vektors bezüglich dieser Basis fest und eindeutig. Dies ist die Aussage des folgenden Theorems.
Theorem 8.5 (Eindeutigkeit der Basisdarstellung) Die Basisdarstellung eines \(v \in V\) bezüglich einer Basis \(B\) ist eindeutig.
Beweis. Ohne Beschränkung der Allgemeinheit nehmen wir an, dass der Vektorraum von Dimension \(m\) ist. Nehmen wir an, dass zwei Darstellungen von \(v\) bezüglich der Basis \(B\) existieren, also dass \[\begin{align} \begin{split} v & = a_1 b_1 + \cdots + a_m b_m \\ v & = c_1 b_1 + \cdots + c_m b_m \end{split} \end{align}\] Subtraktion der unteren von der oberen Gleichung ergibt \[\begin{equation} 0 = (a_1 - c_1) b_1 + \cdots + (a_m - c_m) b_m \end{equation}\] Weil die \(b_1,...,b_m\) linear unabhängig sind, gilt aber, dass \((a_i - c_i) = 0\) für alle \(i = 1,...,m\) und somit sind die beiden Darstellungen von \(v\) bezüglich der Basis \(B\) identisch.
Zum Abschluss dieses Abschnitts wollen wir eine spezielle Basis des reellen Vektorraums betrachten.
Definition 8.13 (Orthonormalbasis von \(\mathbb{R}^m\)) Eine Menge von \(m\) Vektoren \(v_1,...,v_m \in \mathbb{R}^m\) heißt Orthonormalbasis von \(\mathbb{R}^m\), wenn \(v_1,...,v_m\) jeweils die Länge 1 haben und wechselseitig orthogonal sind, also wenn \[\begin{equation} \langle v_i, v_j \rangle = \begin{cases} 1 & \mbox{ für } i = j \\ 0 & \mbox{ für } i \neq j \end{cases}. \end{equation}\]
Wir wollen zunächst ein Beispiel für eine Orthonormalbasis betrachten.
Beispiel (1)
Es ist \[\begin{equation} B_1 := \left\lbrace \begin{pmatrix} 1 \\ 0 \end{pmatrix}, \begin{pmatrix} 0 \\ 1 \end{pmatrix} \right\rbrace \end{equation}\] eine Orthonormalbasis von \(\mathbb{R}^2\), denn \(B_1\) besteht aus zwei Vektoren und es gelten \[\begin{equation} \left\langle \begin{pmatrix} 1 \\ 0 \end{pmatrix}, \begin{pmatrix} 1 \\ 0 \end{pmatrix} \right\rangle = 1 \cdot 1 + 0 \cdot 0 = 1 + 0 = 1 \end{equation}\] sowie \[\begin{equation} \left \langle \begin{pmatrix} 0 \\ 1 \end{pmatrix}, \begin{pmatrix} 0 \\1 \end{pmatrix} \right \rangle = 0 \cdot 0 + 1 \cdot 1 = 0 + 1 = 1 \end{equation}\] und \[\begin{equation} \left \langle \begin{pmatrix} 1 \\ 0 \end{pmatrix}, \begin{pmatrix} 0 \\ 1 \end{pmatrix} \right \rangle = 1 \cdot 0 + 0 \cdot 1 = 0 + 0 = 0 \end{equation}\]
Für allgemeine reelle Vektorräume werden Basen der Form von \(B_1\) mit dem Begriff der kanonischen Basis speziell ausgezeichnet.
Definition 8.14 (Kanonische Basis und kanonische Einheitsvektoren) Die Orthonormalbasis \[\begin{equation} B := \left\lbrace e_1,...,e_m \vert (e_i)_j = 1 \mbox{ für } i = j \mbox{ und } (e_i)_j = 0 \mbox{ für } i \neq j, \, i,j = 1,...,m \right\rbrace \subset \mathbb{R}^m \end{equation}\] heißt die kanonische Basis von \(\mathbb{R}^m\) und die \(e_i\) heißen kanonische Einheitsvektoren.
\(B_1\) aus Beispiel (1) ist also die kanonische Basis von \(\mathbb{R}^2\).
Die kanonische Basis von \(\mathbb{R}^3\) ist \[\begin{equation} B := \left\lbrace \begin{pmatrix} 1 \\ 0 \\ 0 \end{pmatrix}, \begin{pmatrix} 0 \\ 1 \\ 0 \end{pmatrix}, \begin{pmatrix} 0 \\ 0 \\ 1 \end{pmatrix} \right\rbrace. \end{equation}\]
Allerdings gibt es auch nicht kanonische Orthonormalbasen. Dazu betrachten wir ein weiteres Beispiel
Beispiel (2)
Es ist auch \[\begin{equation} B_2 := \left\lbrace \begin{pmatrix} \frac{1}{\sqrt{2}} \\ \frac{1}{\sqrt{2}} \end{pmatrix}, \begin{pmatrix} - \frac{1}{\sqrt{2}} \\ \quad \frac{1}{\sqrt{2}} \end{pmatrix} \right\rbrace \end{equation}\] eine Orthonormalbasis von \(\mathbb{R}^2\), denn \(B_2\) besteht aus zwei Vektoren und es gelten \[\begin{equation} \left \langle \begin{pmatrix} \frac{1}{\sqrt{2}} \\ \frac{1}{\sqrt{2}} \end{pmatrix}, \begin{pmatrix} \frac{1}{\sqrt{2}} \\ \frac{1}{\sqrt{2}} \end{pmatrix} \right \rangle = \frac{1}{\sqrt{2}} \cdot \frac{1}{\sqrt{2}} + \frac{1}{\sqrt{2}} \cdot \frac{1}{\sqrt{2}} = \frac{1}{2} + \frac{1}{2} = 1, \end{equation}\] sowie \[\begin{equation} \left \langle \begin{pmatrix} - \frac{1}{\sqrt{2}} \\ \quad \frac{1}{\sqrt{2}} \end{pmatrix}, \begin{pmatrix} - \frac{1}{\sqrt{2}} \\ \quad \frac{1}{\sqrt{2}} \end{pmatrix} \right \rangle = \left(- \frac{1}{\sqrt{2}} \right)\cdot \left(- \frac{1}{\sqrt{2}} \right) + \frac{1}{\sqrt{2}} \cdot \frac{1}{\sqrt{2}} = \frac{1}{2} + \frac{1}{2} = 1 \end{equation}\] und \[\begin{equation} \left \langle \begin{pmatrix} - \frac{1}{\sqrt{2}} \\ \quad \frac{1}{\sqrt{2}} \end{pmatrix}, \begin{pmatrix} \frac{1}{\sqrt{2}} \\ \frac{1}{\sqrt{2}} \end{pmatrix} \right \rangle = - \frac{1}{\sqrt{2}} \cdot \frac{1}{\sqrt{2}} + \frac{1}{\sqrt{2}} \cdot \frac{1}{\sqrt{2}} = - \frac{1}{2} + \frac{1}{2} = 0 \end{equation}\]
Wir visualisieren die beiden Orthonormalbasen \(B_1\) und \(B_2\) von \(\mathbb{R}^2\) in Abbildung 8.8.